





 Un braccio bionico dai riflessi superveloci potrà aiutare a fare pulizia in orbita, catturando i detriti spaziali. Lungo un metro e mezzo, ha una mano con quattro dita con la quale afferra gli oggetti al volo in meno di cinque centesimi di secondo. E’ stato messo a punto in Svizzera, nel Politecnico di Losanna ed è descritto sulla rivista Ieeexplore – Transactions on robotics.
Un braccio bionico dai riflessi superveloci potrà aiutare a fare pulizia in orbita, catturando i detriti spaziali. Lungo un metro e mezzo, ha una mano con quattro dita con la quale afferra gli oggetti al volo in meno di cinque centesimi di secondo. E’ stato messo a punto in Svizzera, nel Politecnico di Losanna ed è descritto sulla rivista Ieeexplore – Transactions on robotics.
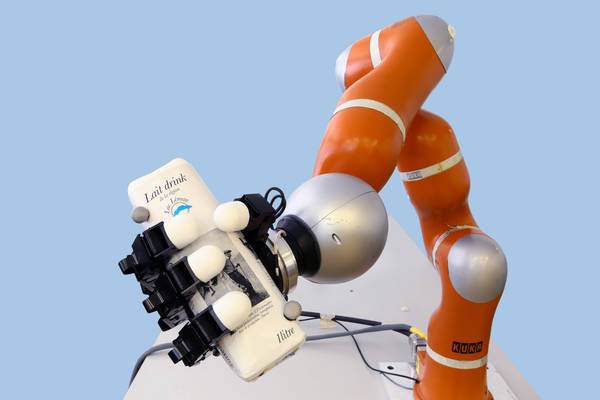
La novità del braccio superveloce è la sua elasticità: impara ad afferrare gli oggetti in modo molto simile a quanto fa l’uomo, ossia imitando chi gli sta di fronte e procedendo per tentativi ed errori. Per questo nel laboratorio Lasa (Learning Algorithms and Systems Laboratory) il collaudo del robot è stato molto simile a un gioco. I ricercatori, coordinati da Aude Billard, hanno lanciato ripetutamente al robot una racchetta da tennis, una palla, un martello, una bottiglia vuota ed una bottiglia semivuota. Ogni volta il robot imparava qualcosa in più, finché non è riuscito ad afferrare a colpi sicuro tutti gli oggetti.
Ogni volta il robot è riuscito ad adattare i suoi movimenti per afferrare oggetti tanti diversi. Ad esempio: nel caso della racchetta, il manico non corrisponde al suo centro di gravità e ancora più difficile è il caso della bottiglia semivuota, il cui centro di gravità si sposta più volte durante la traiettoria.
“Le macchine attuali sono spesso pre-programmate e non possono assimilare rapidamente le modifiche dei dati”, ha detto Billard. ”Di conseguenza – ha aggiunto – la loro unica scelta è ricalcolare le traiettorie. Tuttavia quesa operazione richiede troppo tempo in situazioni in cui ogni frazione di secondo può essere decisiva”. Il braccio superveloce si comporta in modo decidamente diverso: calcola in tempo reale la traiettoria degli oggetti per afferrarli in modo preciso. In questo lo aiutano sia il software sia le tre articolazioni che le telecamere con quali è equipaggiato.
La novità del braccio superveloce è tale che il Centro svizzero per le ricerche spaziali presso il Politecnico di Losanna prevede di utilizzarlo nell’ambito del progetto Clean- mE project. Montato su un satellite, il braccio robotico superveloce potrà essere utilizzato per catturare i detriti spaziali e fare pulizia in orbita.