





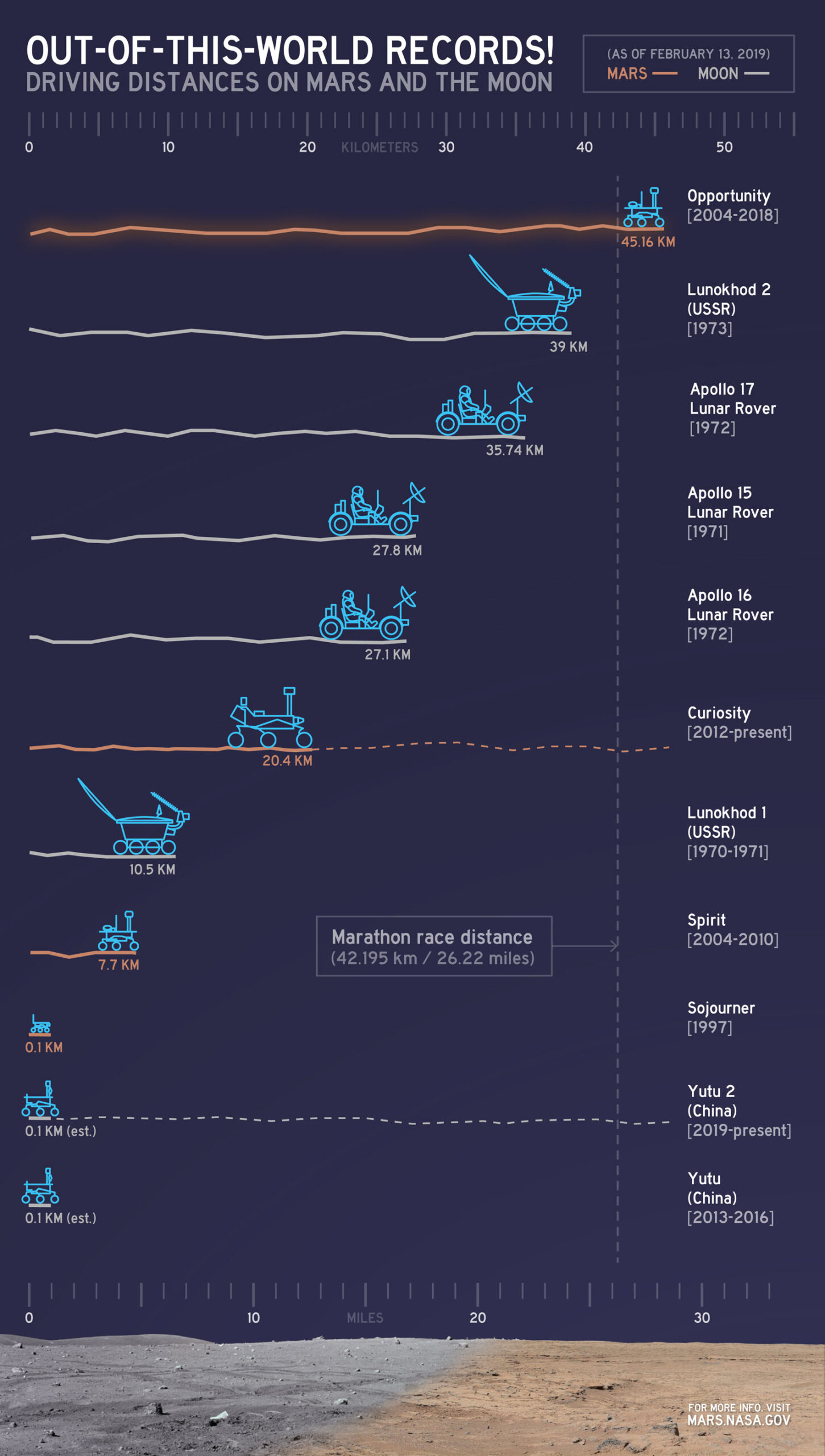
Le distanze percorse dai rover extraterrestri al febbraio 2019. Quelli marziani sono indicati dalle linee rossicce. Crediti: Nasa/Jpl-Caltech
I rover che negli anni si sono succeduti su Marte sono macchine straordinarie. Grazie alle cartoline a definizione sempre più elevata che ci hanno inviato – e continuano a inviarci – ogni giorno, ormai il Pianeta rosso ci sembra di conoscerlo come il nostro giardino. Ma non è così. I rover, anche i più recenti, hanno un problema: vanno molto piano, e fanno dunque pochissima strada. Risultato: di Marte, in realtà, conosciamo da vicino una porzione davvero minima.
«La superficie di Marte ha un’area complessiva pari più o meno a quella delle terre emerse sul nostro pianeta», dice uno dei ricercatori che hanno sviluppato il software di Perseverance, Masahiro (Hiro) Ono, capo del Robotic Surface Mobility Group al Jet Propulsion Laboratory (Jpl), il laboratorio della Nasa che ha coordinato tutti le missioni dei rover su Marte. «Ora, immaginate di essere alieni che non sappiano quasi nulla del nostro pianeta, di atterrare in sette o otto punti della Terra e di guidare per qualche centinaio di chilometri. Vi sarete fatti a quel punto un’idea abbastanza precisa di che cosa sia la Terra? Ovviamente no. Allo stesso modo, se vogliamo rappresentare l’enorme diversità di Marte, avremo bisogno di effettuare molte più misure sulla sua superficie, e la chiave è anzitutto aumentare le distanze, arrivando a coprire auspicabilmente migliaia di chilometri».
Certo, guardando alle performance delle varie generazioni di rover della Nasa che si sono avvicendati sul Pianeta rosso (vedi immagine qui sopra), il miglioramento è evidente. Il primo, Sojourner, in 91 giorni marziani (sol) riuscì a percorrere appena 100 metri. Spirit ha coperto 7.7 km in circa cinque anni, mentre il suo gemello Opportuniy, in 15 anni, ha battuto ogni record, infrangendo il muro dei 45 km. In compenso Curiosity, atterrato nel 2012, ha già alle spalle oltre 21 km e ancora non si è fermato.
Insomma, il trend è senza dubbio positivo, ma non basta. Per un vero salto di qualità occorre un cambio di paradigma: un rover in grado di spostarsi in piena autonomia. Se vi state chiedendo se Perseverance – il rover Nasa attualmente in viaggio verso il Pianeta rosso – sarà in grado di farlo, la risposta è no. A frenarlo è anzitutto la potenza di calcolo. Per quanto allo stato dell’arte, Perseverance si affida infatti a computer di bordo Rad750, molto sicuri e collaudati ma tutt’altro che di ultima generazione.
La svolta richiederà innovazioni radicali, sia in temini di hardware che di software. Da una parte, serviranno computer come quelli al quale sta lavorando il progetto Hpsc della Nasa, con chip multi-core resistenti alle radiazioni ma anche in grado di garantire, a parità di consumi, prestazioni cento volte superiori a quelle delle attuali cpu impiegate in ambito spaziale. E dall’altra serviranno algoritmi d’intelligenza artificiale come quelli che stanno mettendo a punto, sempre alla Nasa, con il programma Maars, orientato a rendere i rover completamente autonomi.
Il team del Jpl della Nasa che sta sviluppando il codice per i futuri rover ha adattato alle missioni spaziali il software “Show and Tell” di Google – un generatore di didascalie per immagini neurale lanciato per la prima volta nel 2014. Crediti: Nasa / Jpl-Caltech
I vantaggi dovrebbero essere notevoli, anzitutto in termini di rapidità – e di conseguenza, appunto, di distanze percorse. Questo perché non ci sarà più bisogno, per ogni movimento, di trasmettere le immagini dell’ambiente al centro di controllo sulla Terra affinché gli scienziati possano valutarne le condizioni e inviare al rover i comandi: sarà il rover stesso, grazie al deep learning, a “interpretare” l’ambiente e a decidere, per esempio, quale tragitto seguire e a quale velocità.
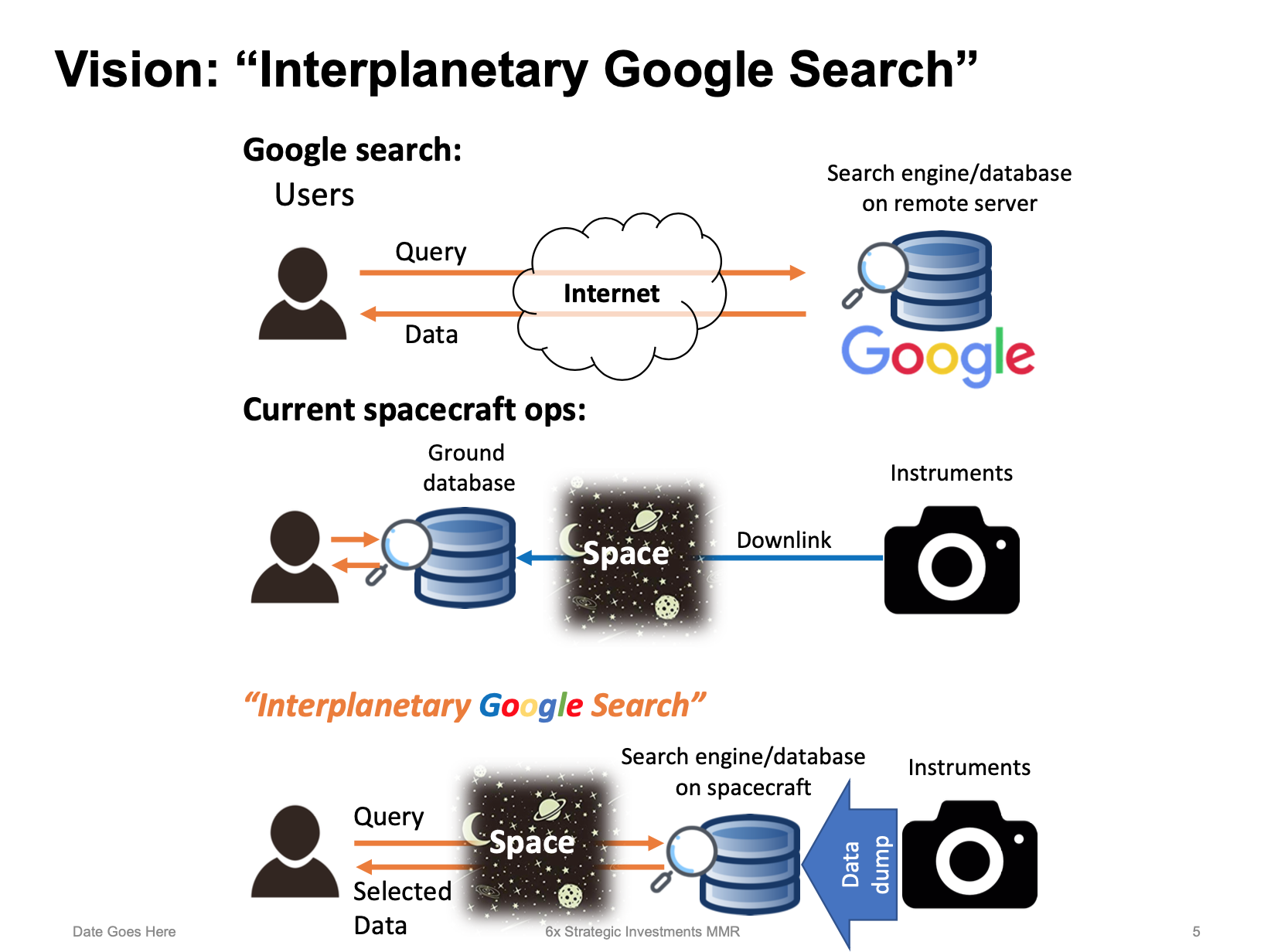
Ma sarà molto più veloce anche l’analisi dei dati, e dunque la scienza che si potrà fare. Per spiegare in che senso, Ono e colleghi usano un’analogia con le ricerche su Google. Qui sulla Terra, quando vogliamo cercare qualcosa in rete, inviamo la nostra query ai server di Google e quelli più o meno istantaneamente rispondono (vedi la prima riga nello schema qui sopra). Per “interrogare Marte”, invece, l’istantaneità ci è preclusa. Se, per esempio, volessimo sapere “quanti sassi con diametro superiore a 20 cm ci sono nel raggio di 50 metri”, dovremmo prima chiedere al rover d’inviarci le immagini ad alta risoluzione della regione che lo circonda, e solo una volta che quella notevole mole di dati sarà stata scaricata nel server qui sulla Terra potremmo interrogare il database (seconda riga). A un rover “intelligente” – un rover in grado di catalogare i sassi in base alle loro dimensioni, per esempio, o magari in base al materiale di cui sono fatti – potremo invece inviare direttamente la nostra query (terza riga): l’elaborazione dei dati avverrebbe sul posto, con un database e con la cpu a bordo del rover stesso, consentendoci di abbattere i tempi d’interrogazione e di poter fare molte più domande. E dunque molta più scienza.
Per saperne di più:
- Leggi il preprint dell’articolo “Show and Tell: A Neural Image Caption Generator”, di Oriol Vinyals, Alexander Toshev, Samy Bengio e Dumitru Erhan