






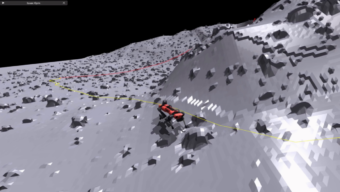
Ricostruzione del rover Leap mentre esplora la superficie lunare. Crediti: Eth Zurigo/Robotics Systems Labs (Rsl)
Il cane è il miglior amico dell’uomo. Si tratta di un detto comune che nei prossimi anni, forse, potrà essere applicato, in via del tutto eccezionale, anche al campo dell’esplorazione planetaria. In questo caso però non ci si riferisce al classici animali a quattro zampe, ma bensì a particolari robot quadrupedi capaci di camminare su superfici sabbiose, arrampicarsi su pendii scoscesi e rocciosi difficilmente accessibili. Su quest’idea si basa un progetto di un consorzio internazionale – costituito dall’Eth di Zurigo, dal Max Planck Institute for Solar System Research, dall’Università di Münster e dalla Open University – che sta lavorando al prototipo di un robot a quattro zampe da integrare sull’European Large Logistic Lander (El3) dell’Agenzia spaziale europea – lander che dovrebbe atterrare sulla Luna più volte tra fine degli anni ’20 all’inizio degli anni ’30.
L’obbiettivo di Leap (Legged Exploration of the Aristarchus Plateau), questo è il nome del robot, è quello di studiare l’altopiano Aristarco, una regione lunare geologicamente unica e diversificata che ospita una delle più alte concentrazioni di caratteristiche vulcaniche, ma che a causa pendii ripidi, rocce e altri ostacoli risulta essere di difficile accesso per gli usuali rover. «Con un robot a quattro zampe», ha annunciato la settimana scorsa all’Europlanet Science Congress Patrick Bambach del Max Planck Institute for Solar System Research tedesco, «possiamo studiare le caratteristiche più importanti della storia geologica e dell’evoluzione della Luna, come gli ejecta attorno ai crateri, i nuovi siti di impatto meteorico e i lava tubes collassati, dove il materiale potrebbe non essere ancora stato alterato dagli agenti atmosferici spaziali e da altri processi».
Il rover Leap viene addestrato utilizzando un approccio di “reinforcement learning” in un ambiente virtuale per simulare il terreno lunare, la gravità e le proprietà della polvere. Crediti: Eth Zürich/Robotics System Lab (Rsl)
I rover tradizionali hanno esplorato la Luna e Marte facendo scoperte importantissime. Tuttavia, l’esplorazione di terreni scoscesi con inclinazioni superiori ai 15 gradi, con grandi massi o caratterizzati da una superficie sabbiosa è particolarmente impegnativa per i rover dotati di ruote. Basti pensare al rover della Nasa Spirit che ha terminò la sua missione nel 2010 rimanendo bloccato nella sabbia marziana. Diversamente Leap, sviluppato sulla base del robot quadrupede AnyMal, può muoversi con diverse andature, consentendo di coprire grandi distanze in breve tempo, arrampicarsi su ripidi pendii, utilizzare strumenti scientifici e persino rialzarsi in piedi a seguito di una caduta. Non solo: Leap è in grado di usare le zampe anche per scavare nel terreno, capovolgere massi per ulteriori ispezioni e raccogliere campioni del suolo. Inizialmente, il robot è stato addestrato utilizzando un approccio di reinforcement learning, una particolare tecnica di machine learning con la quale un computer impara a svolgere un’attività tramite ripetute interazioni eseguite per tentativi ed errori in un ambiente dinamico. Nel caso di Leap è stata realizzato un’ambiente virtuale in grado di simulare il terreno lunare, la gravità e le proprietà della polvere. Ed è proprio nei suoi primi passi che il robot a quattro zampe ha imparato una lezione già scoperta dagli astronauti delle missioni Apollo: la miglior modalità di locomozione sulla Luna è simile a un salto, rendendosi conto che lo slancio risulta essere più efficiente dal punto di vista energetico rispetto al camminare.
Attualmente il nuovo rover quadrupede è ancora in fase di test e il suo design rimane al di sotto di 50 kg – compresi 10 kg di carico scientifico, tra cui sensori multispettrali, radar a penetrazione del suolo, spettrometri di massa, gravimetri e altra strumentazione. Inoltre, la sua capacità di raccogliere campioni e portarli su un veicolo di atterraggio o di ascesa offre ulteriori entusiasmanti opportunità per future missioni volte a studiare e campionare altri corpi del Sistema solare, primi fra tutti Luna e Marte.