





L’11 maggio 2024 lo strumento Mastcam-Z ha scattato queste tre immagini che mostrano il movimento della copertura della fotocamera Aci durante un test per valutare il suo funzionamento. Crediti: Nasa/Jpl-Caltech/Asu/Msss
Per la prima volta, dopo un problema riscontrato lo scorso gennaio, lo strumento Sherloc (Scanning Habitable Environments with Raman & Luminescence for Organics and Chemicals) a bordo del rover Perseverance della Nasa torna a essere operativo sul suolo marziano.
Il 17 giugno gli ingegneri del Jet Propulsion Laboratory (Jpl) hanno confermato che lo strumento è riuscito a raccogliere dati. «Sei mesi di diagnostica, test, analisi delle immagini e dei dati, risoluzione dei problemi e ripetizione dei test non potevano portare a una conclusione migliore», dichiara Kevin Hand, principal investigator di Sherloc.
Montato sul braccio robotico del rover, Sherloc utilizza due telecamere e uno spettrometro laser per cercare composti organici e minerali nelle rocce che in passato si suppone siano state alterate dagli ambienti acquatici marziani e che potrebbero rivelare segni di un’antica vita microbica. Il 6 gennaio, una copertura mobile progettata per proteggere dalla polvere lo spettrometro e una delle sue telecamere si è bloccata in una posizione che ha impedito a Sherloc di raccogliere dati.
L’analisi condotta dal team ha evidenziato il malfunzionamento di un piccolo motore responsabile dello spostamento della copertura e della regolazione della messa a fuoco dello spettrometro e della fotocamera Autofocus and Context Imager (Aci). Testando le potenziali soluzioni su un duplicato dello strumento Sherloc al Jpl, il team ha iniziato un lungo e meticoloso processo di valutazione per verificare se e come fosse possibile spostare la copertura in posizione aperta.

Le immagini catturate da una telecamera di navigazione a bordo di Perseverance il 23 gennaio mostrano la posizione della copertura dello strumento Sherloc, bloccata diverse settimane prima. Crediti: Nasa/Jpl-Caltech
Tra le varie misure adottate, il team ha provato a riscaldare il piccolo motore del copriobiettivo, a comandare il braccio robotico del rover per ruotare lo strumento Sherloc in diversi orientamenti – con il supporto delle immagini della Mastcam-Z –, a far oscillare il meccanismo avanti e indietro per rilasciare qualsiasi detrito potenzialmente in grado di bloccare la copertura e persino a utilizzare il trapano a percussione del rover per cercare di smuoverlo. Finché il 3 marzo le immagini di Perseverance hanno mostrato che il coperchio dell’Aci si era aperto di oltre 180 gradi, liberando il campo visivo dell’imager e consentendo all’Aci di posizionarsi vicino al suo obiettivo.
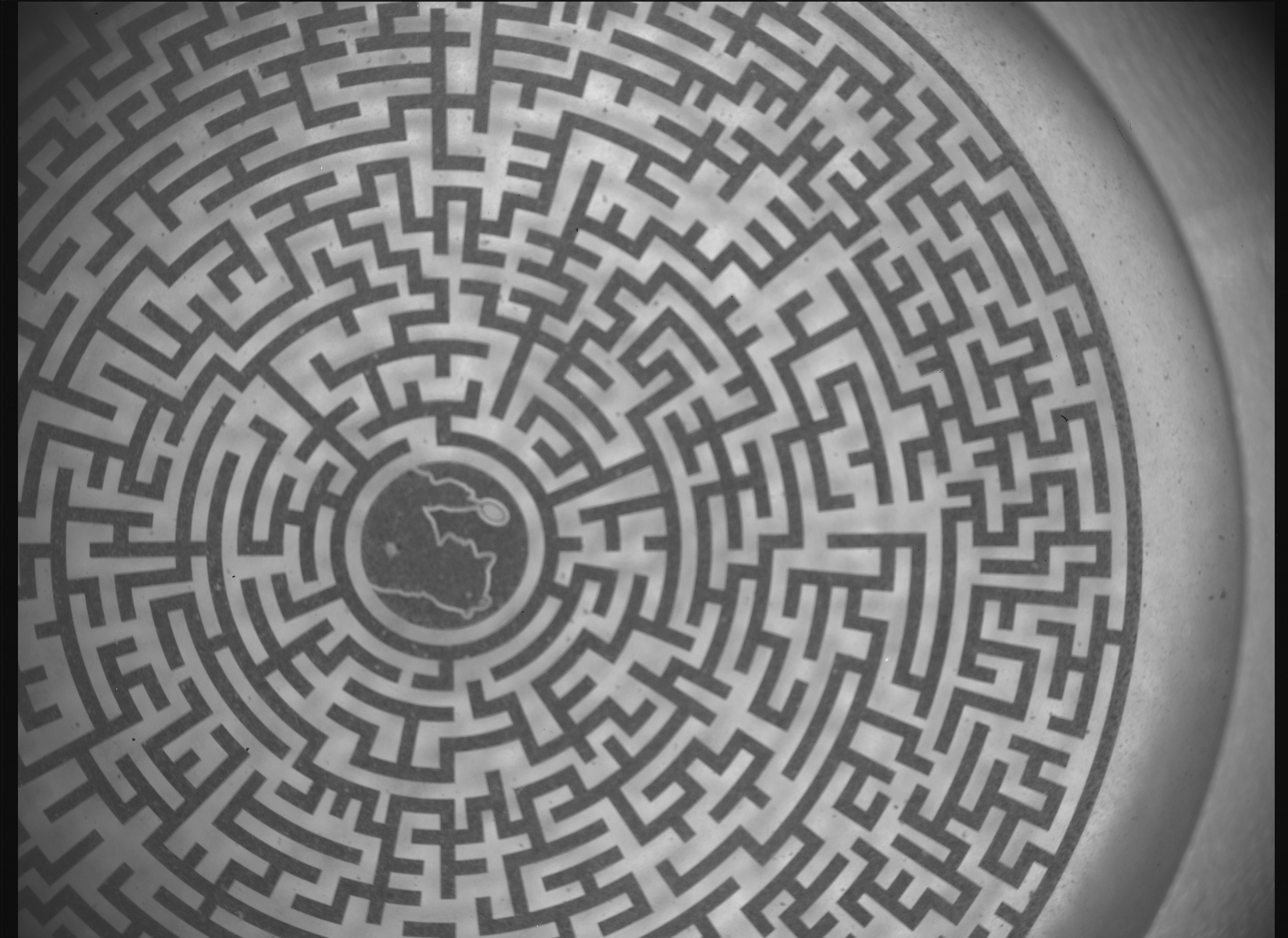
Questo labirinto – con al centro la silhouette di Sherlock Holmes – è usato come target di calibrazione per le telecamere e il laser dello strumento Sherloc, a bordo del rover Perseverance. L’immagine è stata catturata dall’Autofocus and Context Imager di Sherloc l’11 maggio 2024, il 1.147esimo sol della missione, mentre il team del rover stava ultimando gli ultimi test per confermare di aver risolto il problema con la copertura bloccata di una lente. Crediti: Nasa/Jpl-Caltech
Rimaneva solo il problema della messa a fuoco, senza la quale le immagini di Sherloc sarebbero state sfocate e il segnale spettrale sarebbe stato debole. Non potendo modificare manualmente la messa a fuoco delle ottiche dello strumento, per effettuare minime regolazioni della distanza tra Sherloc e il suo obiettivo si sono affidati al braccio robotico del rover al fine di ottenere la migliore risoluzione dell’immagine. Sherloc ha così scattato alcune foto del suo originalissimo calibratore, in modo che il team potesse verificare l’efficacia di questo approccio.
«Il braccio robotico del rover è straordinario. Può essere comandato con piccoli passi di un quarto di millimetro per aiutarci a valutare la nuova posizione di messa a fuoco di Sherloc e può posizionare Sherloc con grande precisione su un obiettivo», riferisce Kyle Uckert del Jpl. «Dopo aver effettuato i test prima sulla Terra e poi su Marte, abbiamo capito che la distanza migliore per il braccio robotico per posizionare Sherloc è di circa 40 millimetri. A questa distanza, i dati raccolti dovrebbero essere ottimi, come sempre».
La conferma del buon posizionamento dell’Aci su un bersaglio roccioso marziano è arrivata il 20 maggio. Il 17 giugno, la verifica del funzionamento dello spettrometro ha chiuso il cerchio, confermando che Sherloc è di nuovo operativo.

Questa immagine del rover Perseverance che raccoglie dati sulle Walhalla Glades è stata scattata il 14 giugno nella regione Bright Angel del cratere Jezero da una delle telecamere frontali del rover. La fotocamera Watson dello strumento Sherloc è la più vicina alla superficie marziana. Crediti: Nasa/Jpl-Caltech